Os valores de alarme aqui apresentados devem ser adotados como referências iniciais para o monitoramento, A definição e ajuste desses limites, deve-se considerar prioritariamente o histórico da máquina incluindo tendência, condição de operação, intervenções realizadas, carga e regime de funcionamento, uma vez que esses fatores são os principais elementos para a caracterização da condição de cada ativo. Ainda assim, por se tratarem de valores de referência, sua ultrapassagem tende a indicar condição anormal do equipamento e, portanto, deve ser tratada como um indicativo de problema potencial. Adicionalmente, esses valores também são amplamente utilizados por fabricantes como referência técnica.
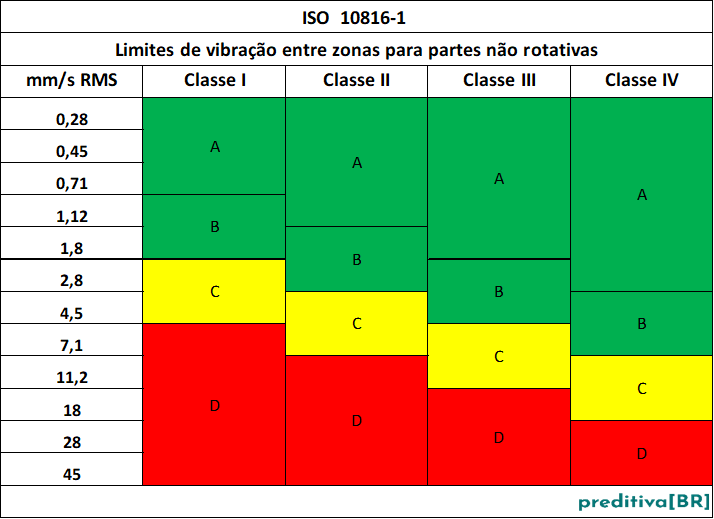
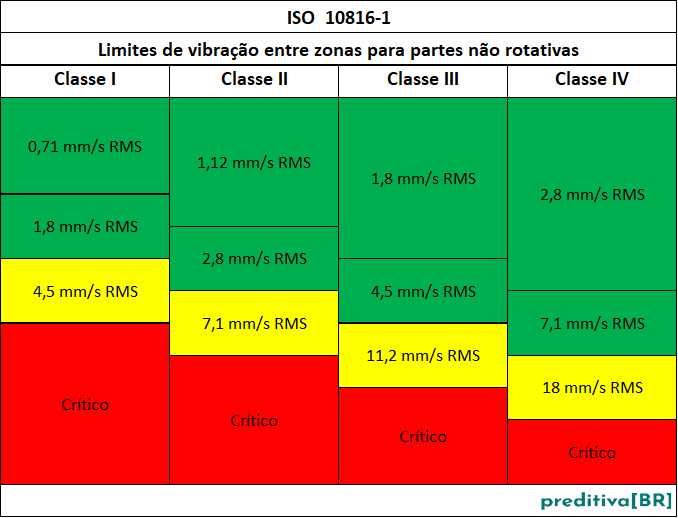
A tabela abaixo resume os limites de Velocidade RMS (mm/s) propostos pela ISO 10816-1, medido em partes não rotativas (mancais, carcaças, bases, etc.). Para utilizá-la, identifique primeiro a classe da máquina (I a IV) conforme potencia e fundação:
Classe I: máquinas pequenas, menores que 15 kW (20 cv);
Classe II: máquinas médias, entre 15 kW e 75 kW (101 cv), em fundações rígidas ou máquinas em fundações especiais até 300 kW (407 cv);
Classe III: máquinas grandes em fundações rígidas;
Classe IV: máquinas grandes em fundações flexíveis.
Em seguida, compare o valor medido na faixa de frequência com a coluna da classe correspondente e a ZONA (A – D).
Os limites valem para os valores globais de vibração entre 10 e 1.000 Hz, ou entre 2 e 1.000 Hz para máquinas abaixo de 600 rpm.
Lembre-se que esses limites são “iniciais” e são substituídos por partes específicas desta norma para certos tipos de aplicações.
Zonas de avaliação
Essas zonas de avaliação servem para classificar qualitativamente o nível de vibração de uma máquina em regime permanente, na velocidade normal de operação, e para orientar decisões sobre ações possíveis. A forma de categorizar e a quantidade de zonas podem variar conforme o tipo de máquina, e essas variações são detalhadas em partes adicionais da ISO 10816 ( atualmente ISO 20816).
Zona A (verde): Ótimo (comissionamento)
Vibração típica de máquinas novas ou recém revisadas. Indica condição mecânica muito boa.
Zona B (verde): Aceitável (operação contínua)
Vibração adequada para operação contínua sem restrições.
Zona C (amarelo): Insatisfatória para longo prazo
Vibração elevada para operação contínua. Em geral é seguro operar por tempo limitado, mas recomenda-se correção programada.
Zona D (vermelho): Crítica (risco de dano)
Vibração em nível considerado severo, com probabilidade de causar danos à máquina.
NOTA: O esforço necessário para manter a vibração dentro da zona A pode ser desproporcional e, muitas vezes, desnecessário.
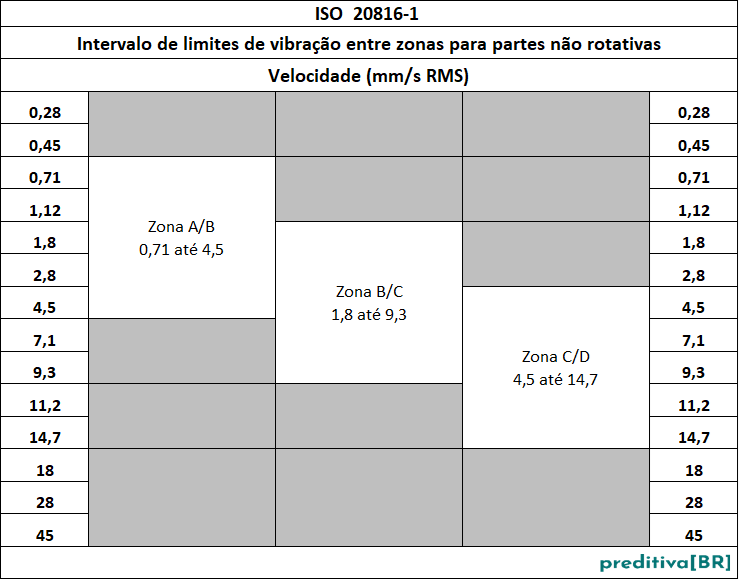
A ISO 20816-1 é a versão atualizada da ISO 10816-1 para avaliação de vibração para partes não rotativas (mancais, carcaças, bases, etc.). Ela reorganiza a norma e esclarece definições, por exemplo, medições no eixo são tratadas em outras partes da ISO 20816, mas o critério de avaliação não mudou: as Zonas A, B, C e D mantêm o mesmo significado. Ao definir os limites entre as zonas, use esta regra prática: máquinas pequenas (motores ≤ 15 kW) tendem ao limite inferior das faixas, enquanto máquinas grandes com apoios mais flexíveis tendem ao limite superior.
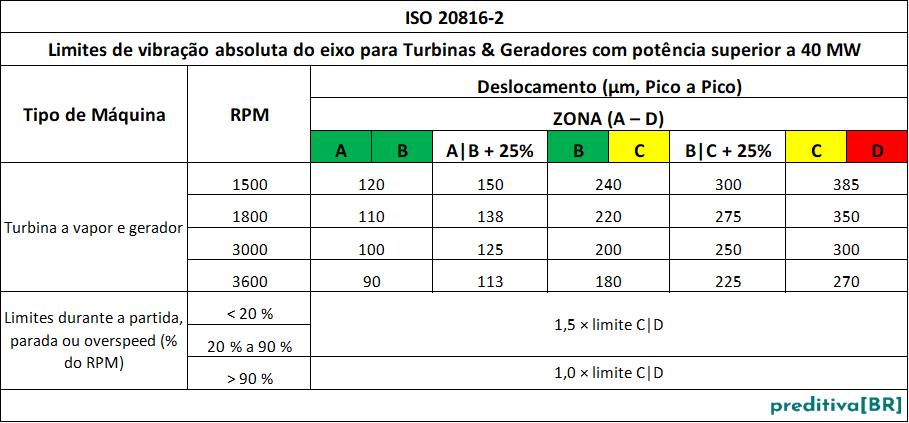
A ISO 20816-2 define limites para avaliar a vibração em mancais e pedestais de Turbinas a Gás, a Vapor e Geradores em instalações terrestres, com potência a partir de 40 MW e velocidades típicas de 1500, 1800, 3000 ou 3600 r/min. Esta norma também se aplica quando esses equipamentos estão diretamente acoplados a turbinas em ciclo combinado.
Esta norma não inclui a vibração de origem eletromagnética em 2 vezes a frequência da rede elétrica 2FL (2 Line Frequency) que são excitações de origem nas bobinas do estator, no núcleo magnético ou na carcaça do gerador.
A|B + 25% é um limite adicional (1,25 x A|B) usado para máquinas novas.
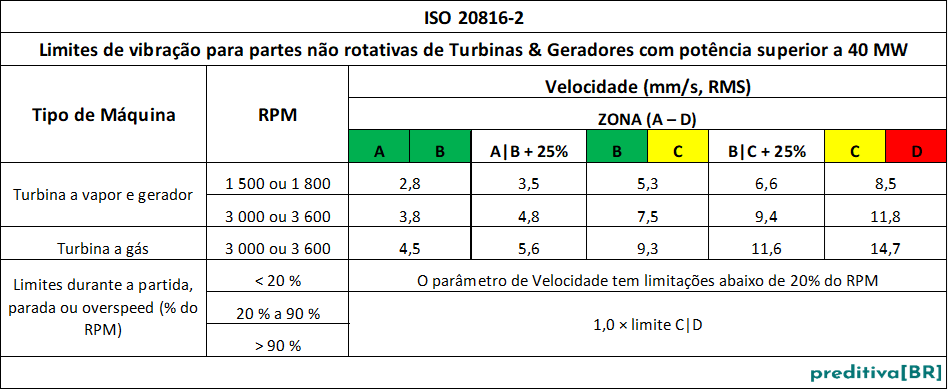
Os limites de alarme durante a partida, parada e overspeed variam conforme o tipo de máquina e seu modo de operação.
Em geral, o limite de alarme deve ser definido com base no histórico da própria máquina. Quando não houver histórico confiável, é aceitável adotar um valor em torno de 25% acima do limite B|C, porém sem ultrapassar 1,0 × o limite C|D.
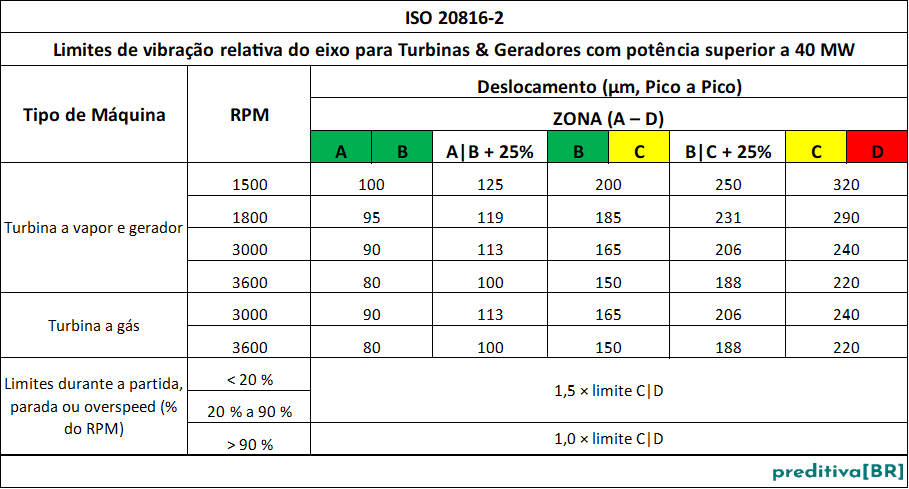
Os limites de alarme durante a partida, parada e overspeed variam conforme o tipo de máquina e seu modo de operação.
Em geral, o limite de alarme deve ser definido com base no histórico da própria máquina. Quando não houver histórico confiável, é aceitável adotar um valor em torno de 25% acima do limite B|C, porém sem ultrapassar 1,5 × o limite C|D até 90% do RPM e 1,0 × o limite C|D para RPM > 90%.
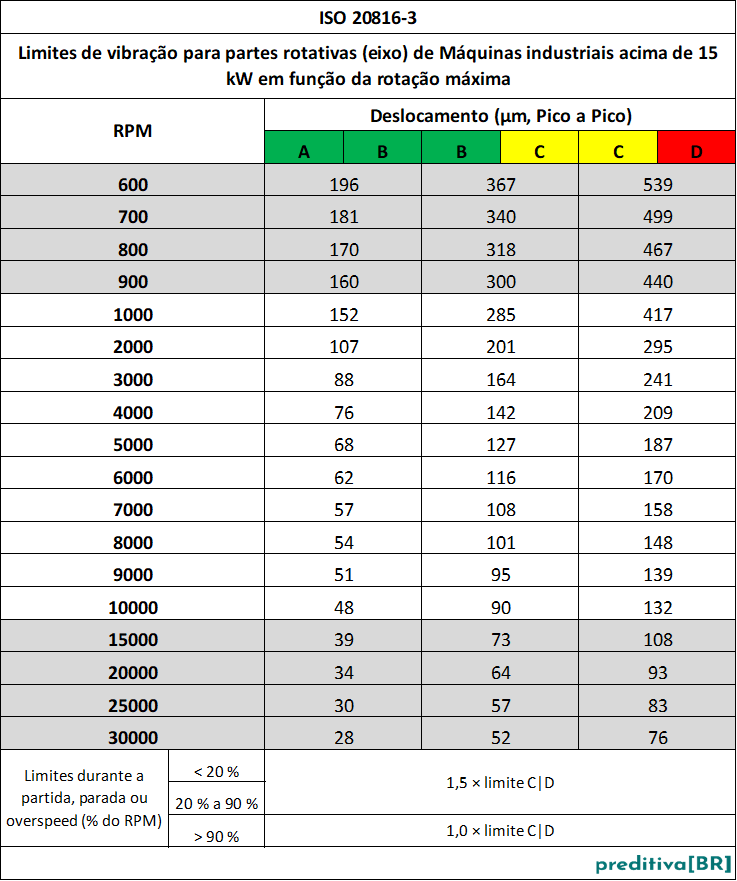
A ISO 20826-3 define requisitos gerais para avaliar a vibração de máquinas industriais acopladas, com potência acima de 15 kW (20 cv) e rotação entre 120 e 30.000 rpm, em medições realizadas com a máquina instalada e em operação normal.
A norma se aplica a diversos tipos de máquinas, incluindo turbinas a vapor e geradores, compressores rotativos, turbinas a gás de até 3 MW, turbo ventiladores, motores elétricos, rolos e moinhos, transportadores, sopradores e ventiladores mais robustos ou com potência acima de 300 kW (407 cv). Máquinas de grandes potências específicas, geradores hidrelétricos, turbinas a gás acima de 3 MW, determinados ventiladores e caixas de engrenagens possuem tratamento complementar ou específico em outras partes da série ISO 20816 e normas correlatas.
Lembre-se que esses limites são “iniciais” e podem ser substituídos por outras partes específicas da Norma para certos tipos de máquinas.
A|B + 25% é um limite adicional (1,25 x A|B) usado para máquinas novas.
H = altura de eixo
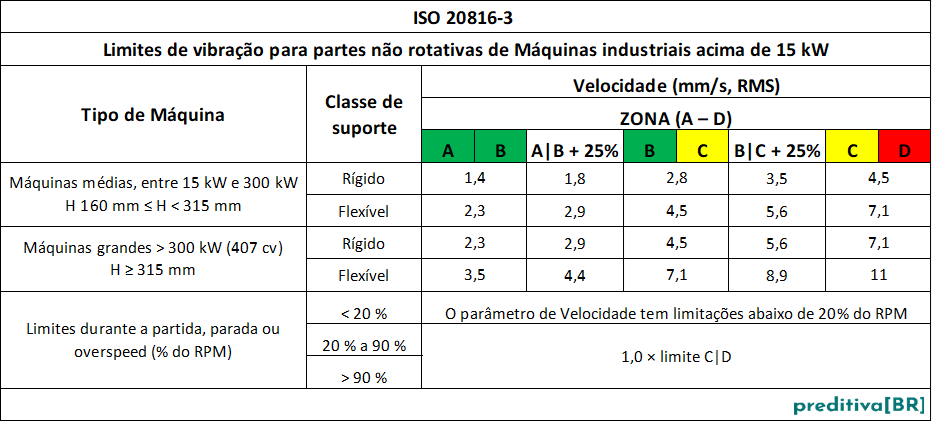
Os limites de alarme durante a partida, parada e overspeed variam conforme o tipo de máquina e seu modo de operação.
Em geral, o limite de alarme deve ser definido com base no histórico da própria máquina. Quando não houver histórico confiável, é aceitável adotar um valor em torno de 25% acima do limite B|C, porém sem ultrapassar 1,0 × o limite C|D.
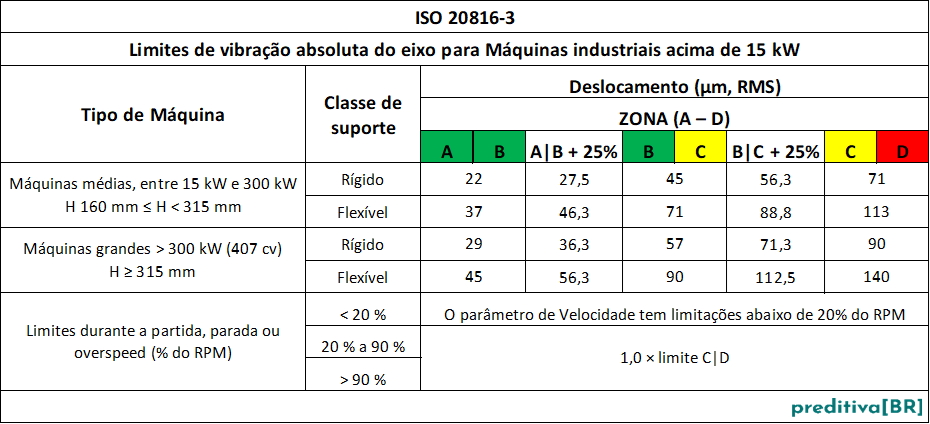
Os limites de alarme durante a partida, parada e overspeed variam conforme o tipo de máquina e seu modo de operação.
Em geral, o limite de alarme deve ser definido com base no histórico da própria máquina. Quando não houver histórico confiável, é aceitável adotar um valor em torno de 25% acima do limite B|C, porém sem ultrapassar 1,0 × o limite C|D.
A ISO 20816-3 para Vibração relativa do eixo, define que os limites de vibração de eixo para as Zonas A, B, C e D são definidos com base em experiência e diminuem conforme a rotação aumenta, pois a vibração admissível é inversamente proporcional à raiz quadrada da velocidade.
O objetivo é garantir que a vibração não gere cargas dinâmicas excessivas nos mancais, não gere aumento da folga radial a ponto de causar contato do eixo com o mancal e não transmita vibrações exageradas à estrutura.
Para máquinas muito lentas (< 600 rpm) ou muito rápidas (> 10.000 rpm), os valores calculados a partir dos critérios gerais da norma podem ultrapassar a folga do mancal e precisam ser ajustados. Esses limites são diretrizes, não especificações contratuais, devendo ser acordados entre fabricante e usuário e adaptados às características do mancal e da máquina.
A regra principal é que o deslocamento relativo do eixo medido pelo sensor de proximidade tem que caber dentro do filme de óleo, sem deixar o eixo tocar no mancal. Se a amplitude de vibração for da ordem da folga, o risco de toque é grande.
Dessa forma, se o valor do limite da zona C/D for maior do que a folga diametral do mancal, a norma recomenda reduzir os limites das zonas, por exemplo:
A/B = 0,4 × folga do mancal
B/C = 0,6 × folga do mancal
C/D = 0,7 × folga do mancal
Os fatores 0,4, 0,6 e 0,7 foram escolhidos para ilustrar o princípio. Fatores diferentes, que devem ser acordados entre o fornecedor e o comprador, podem se aplicar a diferentes tipos de mancais e configurações construtivas.
PLV, Pitch Line Velocity representa a velocidade tangencial na circunferência de passo dos dentes, sendo um parâmetro crítico na definição da severidade.
Em caso de dúvida sobre o valor correto de PLV, recomenda-se adotar inicialmente os limites da Classe B como critério mais conservador para análise e diagnóstico.
A ISO 20816-4, que trata de turbinas a gás de potência acima de 3 MW, adota os mesmos limites de Velocidade global definidos na ISO 20816-2 para a parte de turbina a gás, ou seja, os valores de referência para avaliação da severidade de vibração (Zonas A, B, C e D em termos de mm/s) são equivalentes entre as duas normas para esse tipo de máquina. Na prática, isso significa que, ao avaliar a vibração em velocidade de uma turbina a gás conforme a ISO 20816-4, os critérios de aceitação e severidade são alinhados aos já estabelecidos na ISO 20816-2.
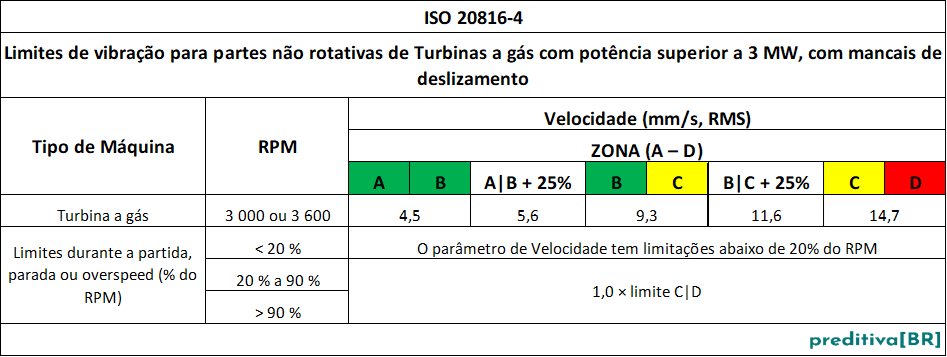
Os limites de alarme durante a partida, parada e overspeed variam conforme o tipo de máquina e seu modo de operação.
Em geral, o limite de alarme deve ser definido com base no histórico da própria máquina. Quando não houver histórico confiável, é aceitável adotar um valor em torno de 25% acima do limite B|C, porém sem ultrapassar 1,0 × o limite C|D.
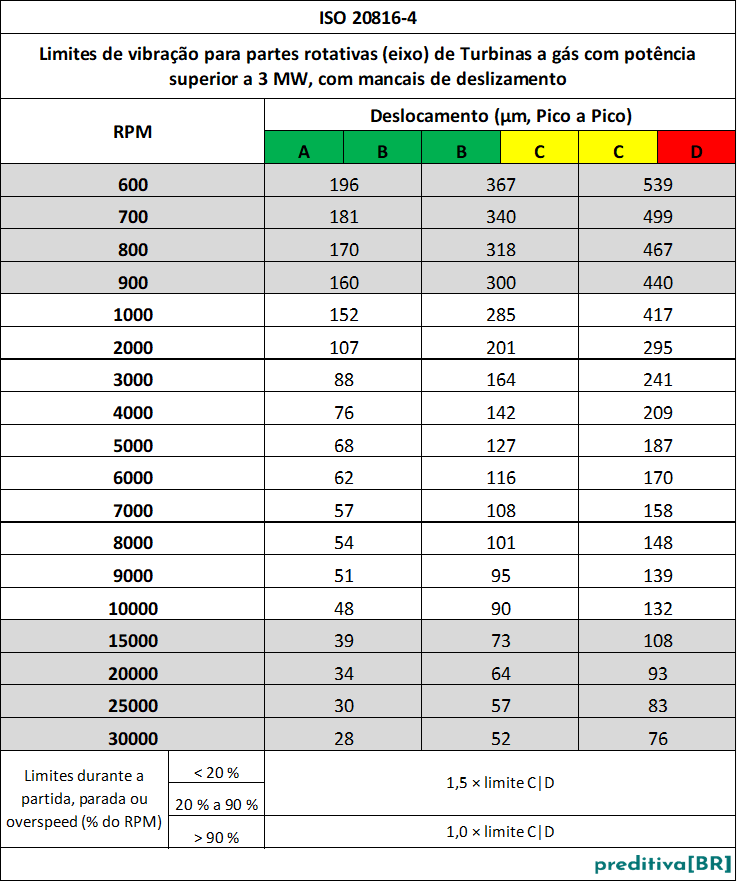
Os limites de alarme durante a partida, parada e overspeed variam conforme o tipo de máquina e seu modo de operação.
Em geral, o limite de alarme deve ser definido com base no histórico da própria máquina. Quando não houver histórico confiável, é aceitável adotar um valor em torno de 25% acima do limite B|C, porém sem ultrapassar 1,5 × o limite C|D até 90% do RPM e 1,0 × o limite C|D para RPM > 90%.
A ISO 10816-6 define critérios para medição e avaliação da vibração mecânica em máquinas alternativas com potência acima de 100 kW, a partir de medições realizadas em partes não rotativas da estrutura da máquina. Em vez de avaliar a vibração no eixo, a norma considera a vibração transmitida ao corpo, mancais, carcaça e estrutura principal, com o objetivo de apoiar a aceitação da máquina, a avaliação de condição operacional e a comparação da severidade de vibração entre diferentes pontos e condições de operação.
A avaliação é feita por meio de três grandezas globais de vibração em valor eficaz (RMS): deslocamento (µm), velocidade (mm/s) e aceleração (m/s²). Essas grandezas não são usadas de forma uniforme em toda a faixa de frequência. A norma estabelece três faixas de medição:
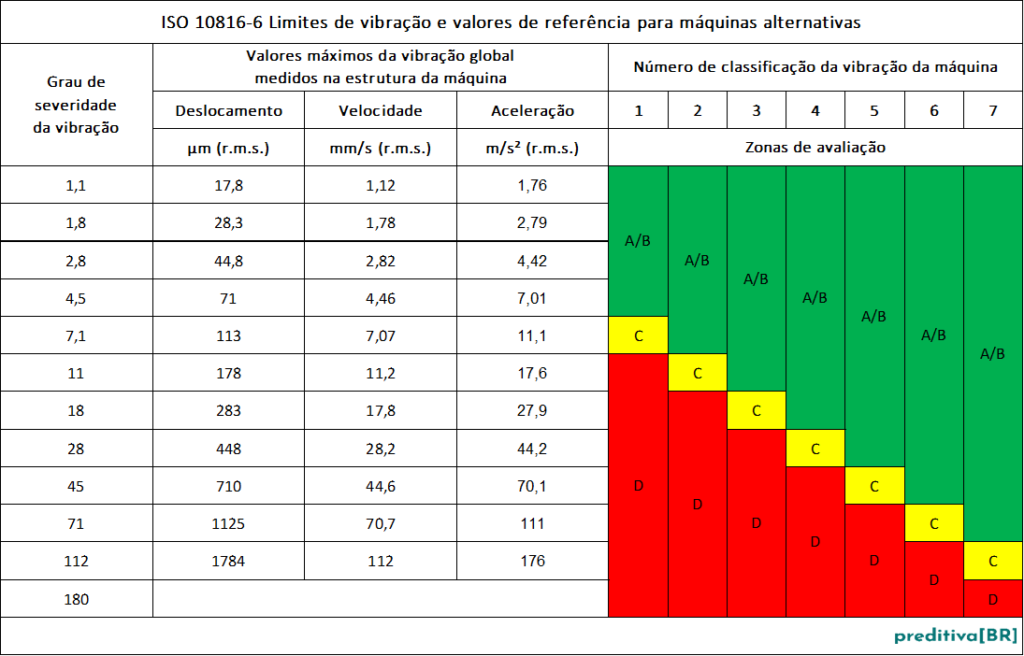
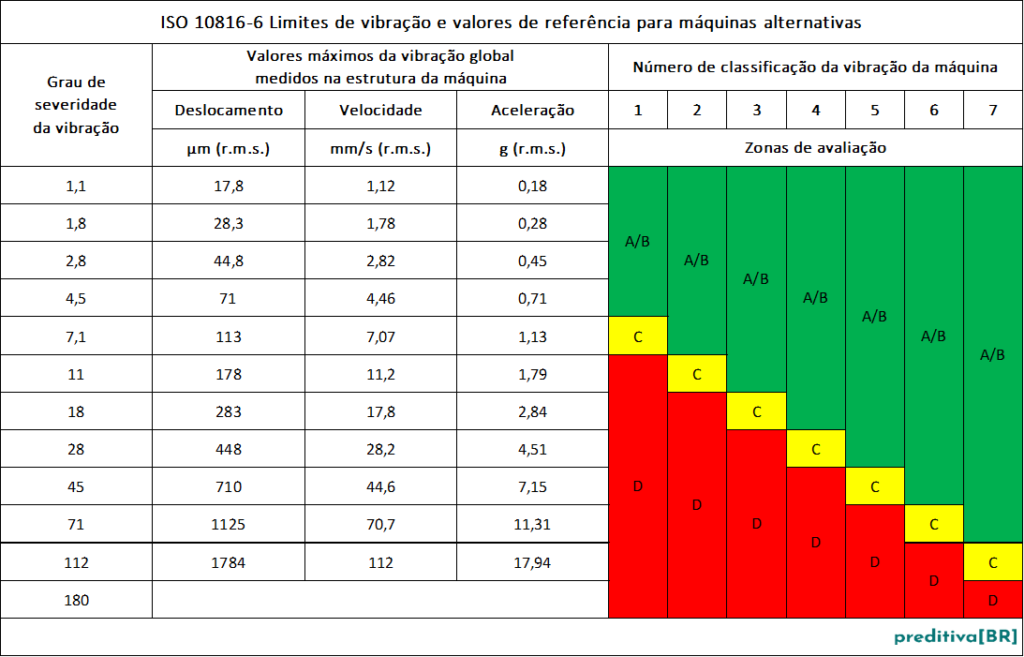
Além disso, a norma introduz o Número de Classificação da Vibração da Máquina (Machine Vibration Classification Number), que serve para relacionar a severidade medida com o tipo e porte da máquina alternativa. Esse número de classificação vai de 1 a 7.
As tabelas abaixo apresentam os limites de vibração em função da frequência de engrenamento GMF (Gear Mesh Frequency), conforme estabelecido pela norma ANSI/AGMA 6000-B96. Os valores são organizados em duas classes: Classe A, aplicável quando PLV é menor ou igual a 25,4 m/s, e Classe B, utilizada para PLV acima de 25,4 m/s. Os valores em RMS foram incluídos para facilitar a comunicação com fabricantes que mantem as medições em RMS.
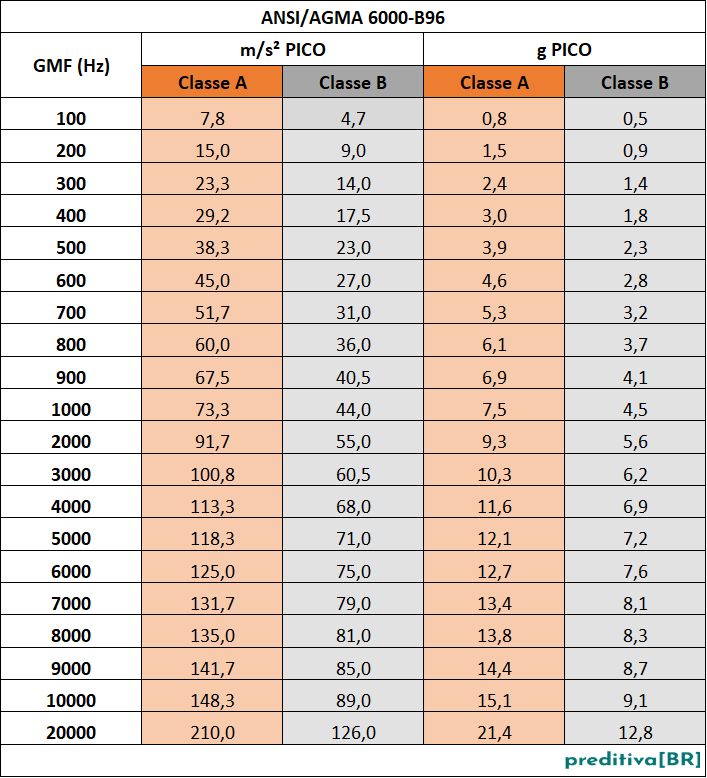
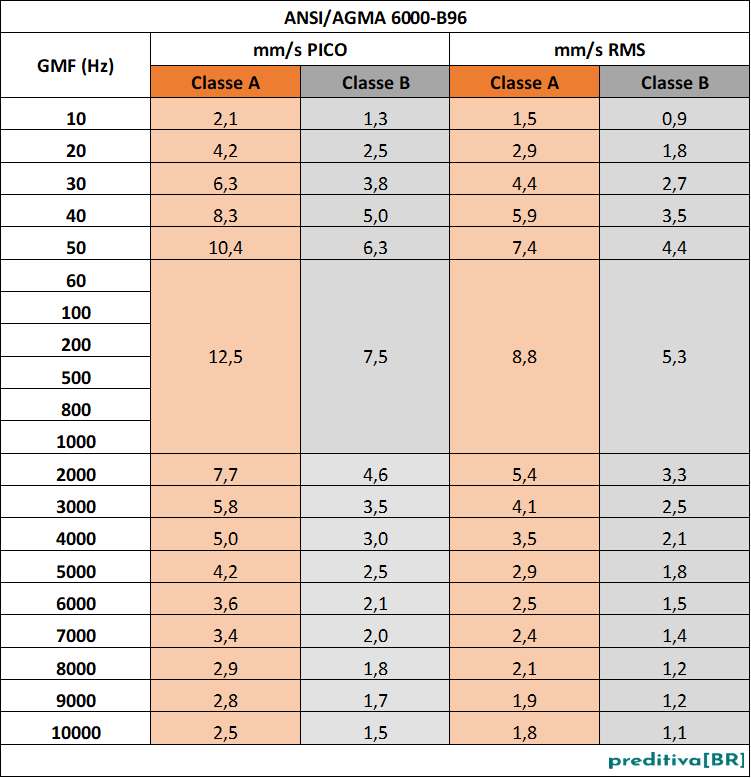
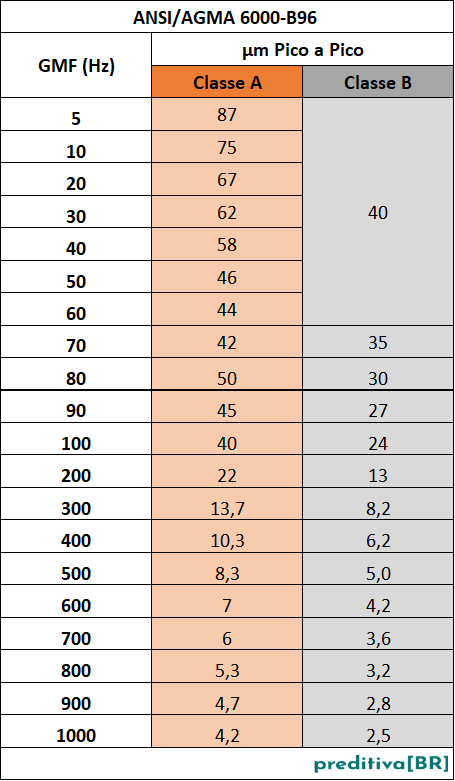
PLV, Pitch Line Velocity representa a velocidade tangencial na circunferência de passo dos dentes, sendo um parâmetro crítico na definição da severidade. Em casos de dúvida sobre a aplicação correta, recomenda-se adotar inicialmente os limites da Classe B como critério mais conservador para análise e diagnóstico.